The Voltage Signal Cannot Read by Module

Dwelling house, Automotive Repair Library, Auto Parts, Accessories, Tools & Equipment, Manuals & Books, Auto BLOG, Links, Index
How to Diagnose a Controller Area Network (CAN)
by Larry Carley copyright 2019 AA1Car.comController Area Network (CAN) electrical systems began to appear in new vehicles in 2003. Since then, more and more vehicles take been equipped with Can systems, until 2008 when virtually all passenger cars and light trucks sold in the U.S. were CAN-equipped.
As a vehicle owner or practice-information technology-yourself mechanic, you demand to know how CAN has made the electrical organisation in late model cars and trucks much more than complicated than ever before. CAN allows various modules and systems to share data and collaborate in means that where previously incommunicable.
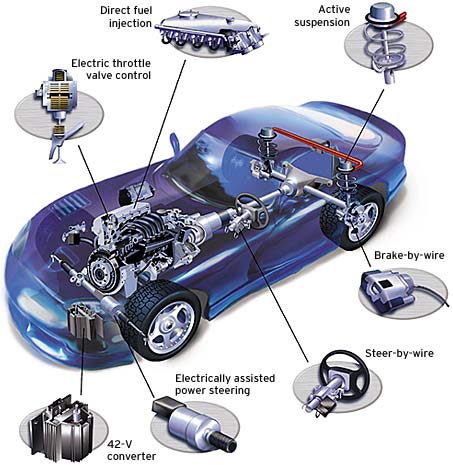
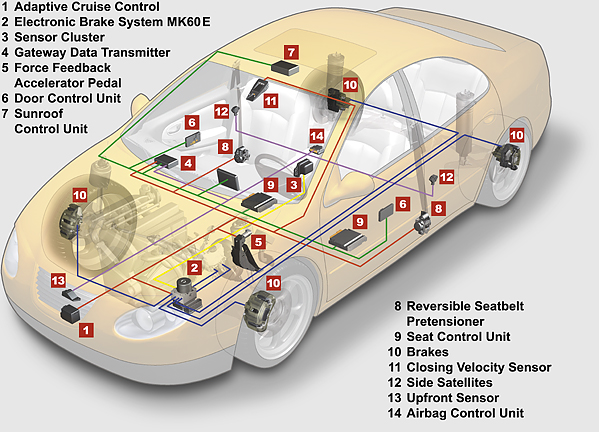
And then what exactly is CAN? It is a advice standard that allows the diverse modules and computers in a vehicle to talk to one another via a common "information bus" circuit in the wiring system. Think of it as a high speed party line that allows information and commands to goose egg back and forth from one module to another. This allows the Powertrain Control Module (PCM), antilock brake/traction control/stability command system, electronic steering, electronic pause, automatic climate command system, keyless entry arrangement, lighting control modules and dozens of other systems and modules to all be interconnected electronically.
The Evolution of Controller Area Networks for Cars
Tin was created in 1984 by the Robert Bosch Corp. in anticipation of future advances in onboard electronics. The showtime production application was in 1992 on several Mercedes-Benz models. Today you will find information technology on all new vehicles.

CAN Diagnostics
If you don't know the difference between a Tin can data bus and a school bus, yous're not alone. Even many professional mechanics are not notwithstanding upwardly to speed on CAN diagnostics. Troubleshooting a late model Tin motorcar is really no different than troubleshooting any late model OBD Ii vehicles. You need a scan tool to read out fault codes and other sensor data, and you need a scan tool that is CAN compliant. That means it has the proper software and hardware to communicate with the vehicle at higher speeds.
Older browse tools (namely, most of those made before most 2006) lack the circuitry to talk to a Tin can system. Some older scan tools have the right hardware, and can exist upgraded with new software. Merely in about cases you will demand a newer browse tool that is CAN-compliant to do onboard diagnostics.
About inexpensive scan tools designed for the DIY marketplace are on-e-way tools: they can read codes and data, but they cannot send commands to the vehicle that are necessary to run all kinds of system self-tests. That degree of composure is reserved for more expensive professional level browse tools or factory scan tools. In addition, the software in a typical DIY scan tool (even if it is CAN-compliant) tin ordinarily only access powertrain codes. It tin can't talk to the ABS organisation, climate control organisation, electronic steering or break systems, climate control system, airbag organization or other onboard electronics. In other words, it is a very limited tool. For avant-garde diagnostics that go beyond simply reading powertrain fault codes and sensor data, y'all need a professional person level tool or a factory tool. The latter tin can be quite expensive, costing thousands of dollars -- plus annual software updates that can add together hundreds more than. And so if you need advanced diagnostics, the only selection for most motorists and DIYers is to have your vehicle to a repair shop that has the proper diagnostic equipment.
How Information Moves Around Your Motorcar in a CAN System
Like many current vehicles, information in a Tin-equipped vehicle is shared over a serial data bus. The bus is the circuit that carries all the electronic chatter between modules (nodes). The bus may have one wire or ii. If it has 2, the wires are unremarkably twisted to cancel out electromagnetic interference. The speed at which the bus carries information will vary depending on the "class" rating of the motorcoach as well as the protocol to which it conforms.
A data motorbus with a "Grade A" speed rating is a relatively slow, low-speed excursion that typically carries less than ten kilobits (10 Kbps) of information per second. A information bus that operates at Class A speeds is limited to simple command functions like operating power mirrors, power seats, power widows, power door locks, remote trunk releases and lights.
A data coach with a "Class B" rating, by comparison, may operate from 10 Kbps up to 125 Kbps, depending on the operating protocol (SAE J1850 or Europe's ISO 9141-2). This is fast plenty to conduct more than complex data and time-sensitive data. Systems that may may share a information jitney with a Course B rating include electronic instrumentation, electronic transmission controls, security systems, and climate control.
Course C is currently the fastest information bus rating. Class C systems can operate at speeds up to one megabits per 2nd, which is up to 100 times faster than a typical Class B data bus. Many of the vehicles that are currently using a Class C data bus are operating at speeds of around 500 Kbps, which is fast enough for powertrain command modules, air bag modules, and fast-acting antilock brake and stability control systems. Eeven faster CAN systems are coming with "class D" ratings of over 1 megabytes per second. And some applications such as onboard amusement systems require even higher speed audio and video streaming.
I affair to keep in mind about the Can standard is that Can as well as other protocols such equally SAE J1939, GMLAN, OBD Two, SAE J1587 and LIN have more to practice with the way information is formatted, transmitted and received than how fast it is sent. This means the automotive engineers who blueprint the onboard electronics for CAN-compliant vehicles are free to choose any operating speed they want (up to one megabits per second) likewise as the type of bus conductor (ane wire, twisted paired wires or a fiber optic cable). On virtually cars today, a high-speed data coach is needed to handle the volume of information going back and forth between all the onboard electronics.
In 1995, GM introduced its own "Course 2" data bus to handle communication betwixt modules. The system ran at a speed of ten,400 $.25 per second (ten.4 Kbps), which was more adequate for vehicles a decade ago. In 2004, GM moved to their next generation information bus system which they called "GMLAN" (GM Local Area Network). Introduced on the Cadillac XLR and Saturn Ion, GMLAN added the adequacy to operate at two speeds on two separate buses: a low speed (33.33 Kbps) coach and a high speed (500 Kbps) bus.
The low speed side of the GMLAN system operates on a single wire autobus to handle trunk-related control functions, while the loftier speed bus uses two wires to bear information between the powertrain, transmission and antilock brake modules. A "gateway" node connects the high speed bus and low speed bus, and allows data to be shared back and forth. For case, the radio (which is connected to the low speed bus) may adjust volume based on engine speed and vehicle speed (from the high speed motorbus) to offset road dissonance.
Mercedes too uses several different bus speeds on their vehicles. Depending on the application, there may be a high-speed 500 Kbps Tin can-C bus for the powertrain, transmission and ABS modules, and a slower-speed 83 Kbps CAN-B bus for the torso command functions. On some Mercedes cars, in that location may be as many as 30 modules on the Can-B charabanc. Up to model yr 2002, all communication between the CAN-C and CAN-B motorcoach went through the electronic ignition switch (EIS) module. Subsequently 2002, a new "gateway" module handles the inter-jitney communications as well as onboard diagnostics via a CAN-D charabanc.
How CAN Data is Sent and Received
If your eyes haven't glazed over even so, here'southward how information is sent and received in a Can arrangement. Every module (node) that is fastened to the data bus network is capable of sending and receiving signals. Each module (node) has its own unique address on the network. This allows the module to receive the inputs and information information technology needs to function, while ignoring information intended for other modules that share the network. When a module transmits data over the network, the information is coded so all the other modules recognize where it came from.
Data is sent as a serial of digital bits consisting of "0's" and "1'south". If you looked at the information on a telescopic, y'all would encounter a square wave pattern that changes betwixt a high and low voltage reading. The low voltage reading usually corresponds to the "0" while the high voltage reading corresponds to the "one". The actual voltage readings will vary depending on the application and protocols the vehicle manufacturer is using, merely most operate in the 5 to vii volts range.
The Tin can standard requires a "base frame" format for the data. What this means is that for each distinct message sent or received by a module on the network, in that location is a beginning flake (called the "first of frame" or "start of message" flake), followed by an "identifier" lawmaking (an eleven bit code that tells what kind of data the message contains), followed by a priority code ("remote transmission asking") that says how important the information is, followed by 0 to 8 bytes (one byte equals 8 bits) of actual data, followed past some more than bits that verify the information (circadian back-up check), followed by some end of message $.25 and an "end-of-frame" bit.
Yet with me? There's more than! One of the tasks of any network arrangement is to keep all the letters separated so they don't collide and garble i some other. Unremarkably the torso control module or instrument cluster module is assigned the chore of managing the network traffic. When it sees a message coming over the bus, it looks at the first scrap in the information stream. If the bit is a "0", the message is given priority over the others. This is called a "dominant" message. If the first bit is a "1" information technology is given a lower priority (a "recessive" bulletin). Thus, the highest priority messages e'er become through to their intended destinations but the depression priority letters may be temporarily blocked until the traffic eases upward.
Tin System Faults
Tin can-compliant vehicles are just as vulnerable to electronic faults as older vehicles. Though Tin can systems use fewer wires and fewer connectors to save weight and cost, they also utilize more modules and more complicated modules. Communication bug can occur if module connectors get corroded or loose, if wires become grounded, shorted or break, or system voltage is below specifications. Some modules may even forget their settings or locations if the battery is disconnected or goes dead.
On some Chrysler minivans, for example, the automatic climate control system will quit working if bombardment power is lost. This happens because the electric stepper motors that control the position of the blend doors forget their locations. The system has to be put into a "relearn" mode to re-establish all the motor locations and settings.
Various kinds of problems can occur on other CAN-equipped vehicles when the battery is disconnected or goes dead. The modules in the CAN system require a certain amount of voltage for their Go on Alive Retentiveness settings. If this is lost, the module volition forget these settings and may not function properly until it has fourth dimension to relearn the lost data. In some cases, this requires a special relearn procedure using a scan tool because the module can't do the relearn by itself. And on some vehicles, the module may get to sleep and non wake upward until it is pinged by a scan tool or the main gateway module (usually the body control module). Relearning procedures typically require a factory scan tool or a professional level aftermarket scan tool.
One of the features of Can and other network systems is that modules can ship and receive "ok" signals to let the main control module know if they are working or not. In theory, this makes diagnostics easier. On the other manus, it likewise ways that one misbehaving module may generate enough noise to disrupt the entire network causing a complete shutdown of the vehicle!
When a serial bus communication problem occurs, it volition ordinarily set a "U" diagnostic trouble code (DTC) and turn on the Malfunction Indicator Lamp (MIL). Depending on the mistake, the vehicle may or may not start, or information technology may only operate in a "limp-in" fashion with limited capabilities. Loss of communication between the engine controller and transmission controller (code U1026 on a GM, for example) may put the transmission into a limp-in mode where it will only operate in 1 or 2 gears.
Loss of communication codes may indicate a wiring problem on the bus, or a mistake with a module. Isolating the fault may require unplugging modules i at a time until the fault is found. Just remember that all modules on a bus network need three things to function properly: power, ground and a serial data connection.
When diagnosing bus or module communication issues, you usually beginning by checking for voltage at the module, then the ground connection, and finally the data line. If all three are skilful simply the module isn't working, the module needs to be replaced.
On GM applications, a code U100 or U1255 ways a full general loss of communication on the data bus. With a Tech 2 browse tool, you tin can go to Diagnostic Circuit Bank check, then Message Monitor to see a list of active modules and compare it to the list of modules that are supposed to be on when the key is on.
To minimize the parasitic electric current drain on the battery when the vehicle is off, a "sleep" betoken is sent to the modules on the network. Some may remain on for a short period of time after the ignition is switched off (air bag module, for example), and some may never become to sleep (anti-theft module and keyless entry receiver, for example) but well-nigh are put into a sleep style to save battery power. If the sleep bespeak is never sent, or a module fails to recognize the sleep betoken, information technology may remain agile and pull ability from the battery. Depending on the electric current draw, this may run down the battery if the vehicle sits for a period of time.
CAN Arrangement Applications
2003 Ford Excursion, 2003 Ford F-250 & F-350, 2003 Ford Focus & Thunderbird, 2003 General Motors Saturn ION, 2003 Lincoln LS, 2003 Mazda 6, and 2003 SAAB nine-3
2004 Buick Rendezvous, 2004 Cadillac CTS, XLR & SRX, 2004 Dodge Durango, 2004 Ford Explorer, 2004 Ford F-150, E-250 & Eastward-350, 2004 Ford Taurus, 2004 Lexus LS430, 2004 Mercury Backwoodsman, 2004 Mercury Sable, 2004 Mazda three & RX-viii, 2004 Toyota Prius, and 2004 Volvo S40
2005 Audi A4 & A6, 2005 Buick LaCrosse, Rendevous & Ranier, 2005 Cadillac STS, 2005 Chevrolet Cobalt, Corvette & Malibu, 2005 Chevrolet Equinox, 2005 Chevrolet SSR, 2005 Chevrolet Trailblazer EXT, 2005 Chrysler 300C, 2005 Dodge Dakota & Magnum, 2005 Ford Crown Victoria, Five Hundred, Focus & Mustang, 2005 Ford Due east-150, 2005 Ford Escape & Expedition, 2005 Ford Freestyle, 2005 GMC Envoy ESV & XL, 2005 Isuzu Ascender, 2005 Jeep Grand Cherokee, 2005 Lexus LS400 & GX470, 2005 Lincoln Town Car, 2005 Mercury Grand Marquis, Montigo & Sable, 2005 Mercury Mariner, 2005 Pontiac G6, Grand Prix & GTO, 2005 Land Rover LR3, 2005 Mazda MPV & Tribute, 2005 Mercedes SLK350, 2005 SAAB 9-7X, 2005 Toyota Avalon, 2005 Toyota 4Runner, Sequoia, Tacoma & Tundra, and 2005 Volvo S60, S80, V50, V70, XC90
Essentially ALL 2008 and newer model year rider cars and light trucks.
Tin Fault Codes
Diagnostic Trouble Code numbers are read past plugging a CAN-compliant lawmaking reader or scan tool into the vehicle diagnostic connector (normally located under the instrument panel well-nigh the steering cavalcade). The presence of a code volition plough on the Check Engine Light. The light will remain on until the lawmaking has been erased. The code number does not tell yous which function has failed. Information technology but indicates a possible error has been detected in the circuit, system or sensor described. Further testing is usually required to isolate the error BEFORE repairs are fabricated. For diagnostic charts and vehicle specific repair information, refer to a service transmission, or the OEM technical website.
Notation: This is only a partial list of all the possible U-codes.
U0001 Loftier Speed CAN Communication Bus
U0002 High Speed Tin Advice Motorbus Functioning
U0003 High Speed CAN Advice Charabanc (+) open
U0004 High Speed Tin Communication Bus (+) low
U0005 High Speed Tin Communication Autobus (+) high
U0006 High Speed CAN Communication Bus (-) open
U0007 High Speed Tin can Advice Bus (-) depression
U0008 High Speed Tin Communication Motorbus (-) high
U0009 High Speed Tin Advice Autobus (-) shorted to Motorcoach (+)
U0010 Medium Speed CAN Advice Jitney
U0011 Medium Speed CAN Communication Bus Functioning
U0012 Medium Speed Tin Communication Motorbus (+) open
U0013 Medium Speed Can Advice Bus (+) depression
U0014 Medium Speed Tin can Communication Bus (+) high
U0015 Medium Speed CAN Communication Bus (-) open
U0016 Medium Speed Tin can Communication Bus (-) depression
U0017 Medium Speed Tin can Communication Autobus (-) high
U0018 Medium Speed Can Communication Bus (-) shorted to Bus (+)
U0019 Low Speed Can Communication Omnibus
U0020 Low Speed Tin Communication Motorbus Functioning
U0021 Low Speed Tin Communication Bus (+) open
U0022 Depression Speed Can Advice Bus (+) low
U0023 Low Speed CAN Communication Bus (+) high
U0024 Low Speed Tin Communication Omnibus (-) open
U0025 Low Speed Tin can Communication Bus (-) low
U0026 Low Speed CAN Advice Motorcoach (-) loftier
U0027 Low Speed Tin can Communication Coach (-) shorted to Bus (+)
U0028 Vehicle Communication Bus A
U0029 Vehicle Communication Bus A Performance
U0030 Vehicle Advice Jitney A (+) open
U0031 Vehicle Communication Motorcoach A (+) low
U0032 Vehicle Advice Passenger vehicle A (+) high
U0033 Vehicle Advice Omnibus A (-) open
U0034 Vehicle Communication Motorcoach A (-) low
U0035 Vehicle Communication Coach A (-) high
U0036 Vehicle Advice Omnibus A (-) shorted to Bus (+)
U0037 Vehicle Communication Bus B
U0038 Vehicle Communication Bus B Performance
U0039 Vehicle Advice Bus B (+) open
U0040 Vehicle Advice Autobus B (+) low
U0041 Vehicle Advice Bus B (+) loftier
U0042 Vehicle Communication Bus B (-) open
U0043 Vehicle Communication Autobus B (-) depression
U0044 Vehicle Communication Passenger vehicle B (-) high
U0045 Vehicle Advice Passenger vehicle B (-) shorted to Motorcoach (+)
U0046 Vehicle Advice Jitney C
U0047 Vehicle Communication Passenger vehicle C Operation
U0048 Vehicle Communication Charabanc C (+) open
U0049 Vehicle Communication Jitney C (+) low
U0050 Vehicle Communication Bus C (+) high
U0051 Vehicle Advice Charabanc C (-) open
U0052 Vehicle Communication Motorbus C (-) low
U0053 Vehicle Communication Motorbus C (-) high
U0054 Vehicle Communication Passenger vehicle C (-) shorted to Bus (+)
U0055 Vehicle Communication Bus D
U0056 Vehicle Communication Bus D Functioning
U0057 Vehicle Communication Bus D (+) open
U0058 Vehicle Communication Autobus D (+) depression
U0059 Vehicle Communication Bus D (+) loftier
U0060 Vehicle Communication Bus D (-) open
U0061 Vehicle Communication Bus D (-) low
U0062 Vehicle Advice Charabanc D (-) high
U0063 Vehicle Advice Bus D (-) shorted to Bus (+)
U0064 Vehicle Advice Motorcoach Eastward
U0065 Vehicle Communication Jitney Due east Functioning
U0066 Vehicle Communication Bus E (+) open
U0067 Vehicle Communication Motorcoach E (+) low
U0068 Vehicle Communication Motorcoach E (+) loftier
U0069 Vehicle Communication Double-decker Due east (-) open
U0070 Vehicle Communication Omnibus E (-) low
U0071 Vehicle Communication Jitney E (-) high
U0072 Vehicle Communication Bus Eastward (-) shorted to Motorcoach (+)
U0073 Control Module Communications Bus A Off
U0074 Control Module Communications Bus B Off
U0100 Lost Communication with ECM/PCM A
U0101 Lost Advice with TCM
U0102 Lost Communication with Transfer Case Command Module
U0103 Lost Communication with Gear Shift Module
U0104 Lost Advice with Cruise Control Module
U0105 Lost Communication with Fuel Injector Control Module
U0106 Lost Communication with Glow Plug Control Module
U0107 Lost Communication with Throttle Actuator Control Module
U0108 Lost Communication with Alternative Fuel Control Module
U0109 Lost Communication with Fuel Pump Control Module
U0110 Lost Communication with Bulldoze Motor Command Module A
U0111 Lost Communication with Bombardment Free energy Control Module A
U0112 Lost Communication with Battery Free energy Control Module B
U0113 Lost Advice with Emissions Critical Command Info
U0114 Lost Communication with 4-Bike Drive Clutch Command Module
U0115 Lost Communication with ECM/PCM B
U0116 Lost Communication with Coolant Temperature Control Module
U0117 Lost Advice with PTO Control Module
U0118 Lost Communication with Fuel Additive Control Module
U0119 Lost Advice with Fuel Jail cell Command Module
U0120 Lost Communication with Starter/Generator Control Module
U0121 Lost Communication with ABS Control Module
U0122 Lost Communication with Vehicle Dynamics Control Module
U0123 Lost Advice with Yaw Charge per unit Sensor Module
U0124 Lost Communication with Lateral Dispatch Sensor Module
U0125 Lost Communication with Multi-Axis Acceleration Sensor Module
U0126 Lost Communication with Steering Bending Sensor Module
U0127 Lost Communication with Tire Pressure level Monitor Module
U0128 Lost Communication with Parking Restriction Control Module
U0129 Lost Communication with Brake System Command Module
U0130 Lost Communication with Steering Endeavour Control Module
U0131 Lost Communication with Power Steering Control Module
U0132 Lost Communication with Break Control Module A
U0133 Lost Communication with Agile Roll Control Module
U0139 Lost Communication with Suspension Control Module B
U0140 Lost Advice with Body Control Module
U0151 Lost Communication with Restraints Control Module
U0155 Lost Communication with Instrument Console Cluster Control Module
U0161 Lost Advice with Compass Module
U0162 Lost Advice with Navigation Display Module
U0163 Lost Communication with Navigation Control Module
U0164 Lost Communication with HVAC Control Module
U0165 Lost Communication with Rear HVAC Command Module
U0167 Lost Communication with Vehicle Immobilizer Control Module
U0168 Lost Communication with Vehicle Security Control Module
U0169 Lost Advice with Sunroof Control Module
U0170 Lost Communication with Restraint System Sensor A
U0171 Lost Communication with Restraint System Sensor B
U0172 Lost Advice with Restraint System Sensor C
U0173 Lost Communication with Restraint System Sensor D
U0174 Lost Communication with Restraint Organization Sensor East
U0175 Lost Advice with Restraint System Sensor F
U0180 Lost Advice with Automatic Lighting Control Module
U0181 Lost Communication with Headlamp Leveling Control Module
U0182 Lost Communication with Front Lighting Command Module
U0183 Lost Communication with Rear Lighting Command Module
U0184 Lost Communication with Radio
U0185 Lost Communication with Antenna Control Module
U0187 Lost Communication with Digital Disc Actor/Changer Module A
U0197 Lost Communication with Telephone Control Module
U0198 Lost Communication with Telematic Command Module
U0199 Lost Communication with Door Control Module A
U0200 Lost Communication with Door Control Module B
U0201 Lost Advice with Door Control Module C
U0202 Lost Communication with Door Control Module D
U0212 Lost Communication with Mirror Control Module A
U0222 Lost Communication with Door Window Motor A
U0235 Lost Advice with Cruise Control Front Distance Range Sensor
U0241 Lost Communication with Headlamp Command Module A
U0242 Lost Communication with Headlamp Control Module B
U0246 Lost Communication with Seat Control Module E
U0254 Lost Communication with Remote Outset Module
U0293 Lost Communication with Hybrid Powertrain Control Module
U029A Lost Communication with Hybrid Battery Pack Sensor Module
U0301 Software Incompatibility with ECM/PCM
U0302 Software Incompatibility with TCM (Manual Command Module)
U0303 Software Incompatibility with Transfer Example Control Module
U0321 Software Incompatibility with Ride Level Command Module
U0326 Software Incompatibility with Vehicle Immobilizer Control Module
U0327 Software Incompatibility with Vehicle Security Control Module
U0400 serial codes Invalid data received from various modules
U0500 series codes Invalid data received from diverse modules
U3000 Control Module
Click Hither to Download or Print This Article.

 More Engine Diagnosis Articles:
More Engine Diagnosis Articles:
Tin advice problem (what to do when the CAN system won't talk to your scan tool) More Engine Diagnosis Articles:
More Engine Diagnosis Articles:Flash Reprogramming PCMs
More on Flash Reprogramming PCMs
Powertrain Control Modules (PCMs)
Problem Codes
Making Sense of Engine Sensors
Agreement Engine Management Systems
Throttle-By-Wire systems (Electronic Throttle Control)
All Almost Onboard Diagnostics Two (OBD II)
Zeroing in on OBD Ii Diagnostics

Be sure to visit our other websites:

Auto Repair Yourself
CarleySoftware
OBD2HELP.com
Random-Misfire.com
Scan Tool Help
TROUBLE-CODES.com
Source: https://aa1car.com/library/can_systems.htm
0 Response to "The Voltage Signal Cannot Read by Module"
Post a Comment